RefFrame
The reference frame RefFrame is 0xyz, orthogonal and direct, attached to ground, where z is vertical \"pointing to the sky\".
Vector notation
Taking velocity as an example for a vector,
vVel is the vector,
uvVel is the normalized
vVel,
the vector modulus is
mVel. Hence
vVel=
uvVel *
mVel.
The projection on the horizontal plane of
vVel is
vVelh, the modulus of which is
mVelh.
The 2 direction-angles of a vector will be prefixed by "a" ( for azimuth/yaw) in the horizontal plane
, and "e" ( for elevation/pitch) in the vertical plane.
Then, for velocity
uvVelx= cos(
aVel)* cos(
eVel)
uvVely= sin(
aVel)* cos(
eVel)
uvVelz= sin(
eVel)
mVelh=
mVel * cos(
eVel)
vVelhx=
mVelh* cos(
aVel)
vVelhy=
mVelh* sin(
aVel)
Solid in 3D space
The orientation of a solid is defined by the usual 3 Euler angles;
Yaw ( or
Heading) is a rotation around the world z-axis
and is equal to zero when pointing like the RefRame x-axis,
Pitch is around the resulting new y-axis ( which remains in
the horizontal plane) and
Roll around the new x-axis.
Unless stated otherwise, all angles are assumed to be in degrees and wrapped in [0 included, 360 excluded[.
Velocity, acceleration
vVel is the mobile ( bot) velocity relative to the ground, ie measured in RefRame.
aVel is the TrackAngle, ie the direction of velocity in the xy plane.
The acceleration vector is
vAcc= d
vVel/d
t=
vAccL+
vAccT, where
the longitudinal acceleration
vAccL is d
mVel/d
t *
uvVel, tangential to the trajectory.
the transversal acceleration
vAccT is
mVel* d
uvVel/d
t, perpendicular to
uvVel.
Yaw and
aVel can be different( eg: a mobile moving backwards, or slipping sideways on icy ground)
Circular trajectory in 2D
With
C representing the center of the turn, a circular trajectory is expressed
-either as
CM= Radius= constant,
-or
vVel•
vCM= 0 ( dotprod(
vVel,
vCM)= 0) ie
aVel=
aPolarAngCM +
Sgn* 90 degrees, the radius being undetermined.
The following relationships hold, with
omega defined as d
aVel/d
t:
omega= d
aVel/d
t=
mVel/
R, where
R is the turn radius.
the side-acceleration
mAccT, by definition perpendicular to
vVel, is:
mAccT=
mVel*
omega, and
vAccT is directed towards
C.
Hence a bound set on one bot variable among yaw speed
omega,
mAccT and radius
R can be translated in a bound on either of the 2 other variables and can be considered as equivalent.
Still, we can expect a game engine to implement bounds
-on yaw speed; if not, one needs anyway to be introduced for the bot because human players cannot
move the mouse at infinite speed,
-on
mAccT, wich relates more to the physics of the mobile simulated by the engine (eg: no skidding limit); it reflects in particular the fact that the max yaw speed can usually be increased ( ie the min turn radius decreased) to some point by reducing speed
mVel.
Bounds expressed as a radii will rather be reflecting constraints on the wished trajectory resulting from the 3d world geometry and bounding boxes/cylinders of bot/other objects.
Controls
Whatever the engine or bot AI variable X, if the player/the bot can issue
a command ( eg through the keyboard or the mouse for a player) setting the
value of that variable, it will termed as a control and prefixed with "U_" like U_X.
This assumes that the game engine or a BotAI sub-system input by U_X can run a
process directly or indirectly modifying X and striving to make it equal to U_X.
Controls offerred by the game engine ( or equivalents) start with UE_.
The mobile
The position of the mobile is denoted
M(
Mx,
My).
Its local x-axis, ie its Forward-axis, points "in front" of it.
Its "propulsion/breaking" device ( the legs of the bot in Half-life) explicitely
or implicitely creates acceleration along its Frwd-axis, ie it can modulate velocity
along that axis by setting a velocity modulus command
UE_mVel.
The velocity direction is controlled through changes in
Yaw by setting
values for
UE_yaw, ie a rotation around the mobile local z-axis; backwards moves commands will still have a positive
UE_mVel but with
UE_yaw=
U_aVel+ 180.
A consequence is that, even if the velocity is zero,
aVel can be defined as equal to
Yaw(+0|+180).
In Half-life, for a human player,
UE_mVel is set by depressing a keyboard button,
and
UE_yaw is indirectly controlled through the view-angle control, ie the mouse.
For a bot, the engine function ( pfnrunPlayerMove()) expects an ideal
( or wished) velocity
UE_vVel, which can be easily computed from a (
UE_mVel,
U_aVel) pair.
Unless stated otherwise, the velocity component on the z-axis
vVelz is
assumed to be managed either by the game-engine, or by a separate BotFunction.
Therefore the (
UE_mVel=
UE_mVelh,
UE_yaw) pair, the (
UE_vVelx,
UE_vVely) pair
and
UE_vVel=
UE_vVelh are considered as equivalent representations of game engine velocity controls.
A mobile reference to a point
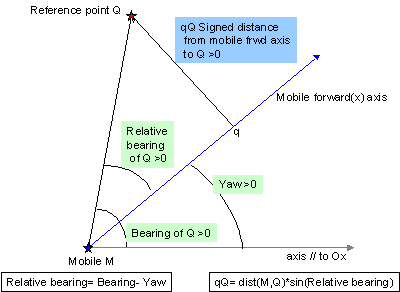
The position of a destination point is denoted
Q.
The vector joining
M to
Q is
vMS. the corresponding unitary vector is
uvMQ.
The angle between the RefFrame and
vMQh is the bearing denoted
Bear.
The angle between the mobile Frwd-axis and
vMQh is the relative bearing, denoted
RBear.
Hence
RBear=
Bear-
Yaw [see Figure].
The angle between the mobile velocity
vVel and
vMQh is denoted
VelRBear.
Hence
VelRBear=
Bear-
aVel.
A mobile reference to a directed line
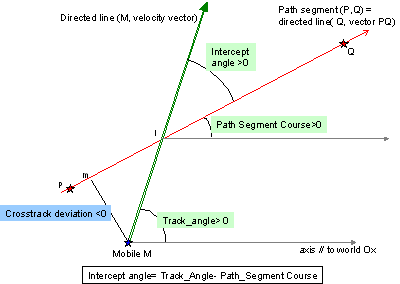
The directed line is defined by 2 points P and Q, or by Q and a unitary vector pointing towards Q.
The vector joining P to Q is
vPQ. the corresponding unitary vector is
uvPQ.
The angle between the RefFrame x-axis and
vPQ is the directed segment
Course denoted
aPQ.
The angle between the mobile
vVel and
vPQ is the intercept angle, denoted
XTDAngle.
Hence
XTDAngle=
aVel-
aPQ=
aVel-
Course [see Figure].